Autonomous Driving Intelligence Research Team
Founded in 2023 at ETRI, ADIR studies motion forecasting and planning, 3D object detection and tracking, and bird's-eye-view semantic segmentation for autonomous driving.
About ADIR Team
ADIR focuses on robust machine intelligence for real-world autonomous driving systems. Our recent work spans trajectory prediction, local path generation, neural planning, and spatially consistent BEV scene understanding.
News
- [2026-02-21] One paper submitted to CVPR 2026 has been accepted.
- [2025-10-15] One paper submitted to Transactions of KSAE has been accepted.
- [2025-09-08] One paper submitted to ICTC 2025 has been accepted.
- [2025-04-22] Two papers submitted to ICACI 2025 have been accepted.
- [2024-07-29] One paper submitted to ICTC 2024 has been accepted.
- [2024-06-30] One paper submitted to IROS 2024 has been accepted as an oral paper.
- [2023-08-09] One paper submitted to ETRI Journal has been accepted.
- [2023-06-01] One paper submitted to ICIAS has been accepted.
- [2023-05-04] One paper submitted to Transactions of KSAE has been accepted.
Notice: We do not have plans to recruit students this year.
Research Highlights
We design data-driven planning and perception methods that generalize across diverse driving conditions.
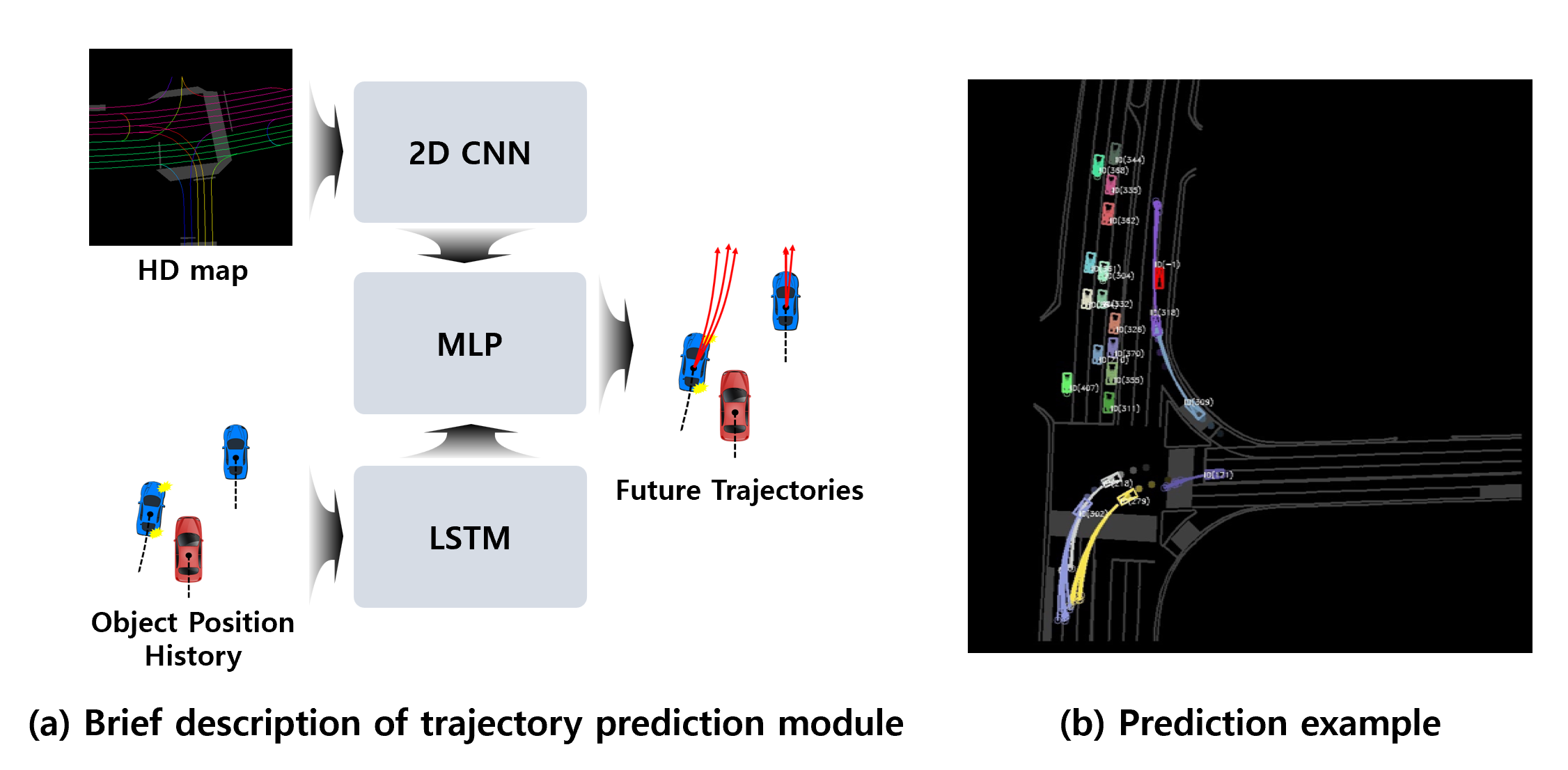
Future Trajectory Forecasting
Multi-modal trajectory forecasting methods that model interaction context and scene constraints.
Related publications
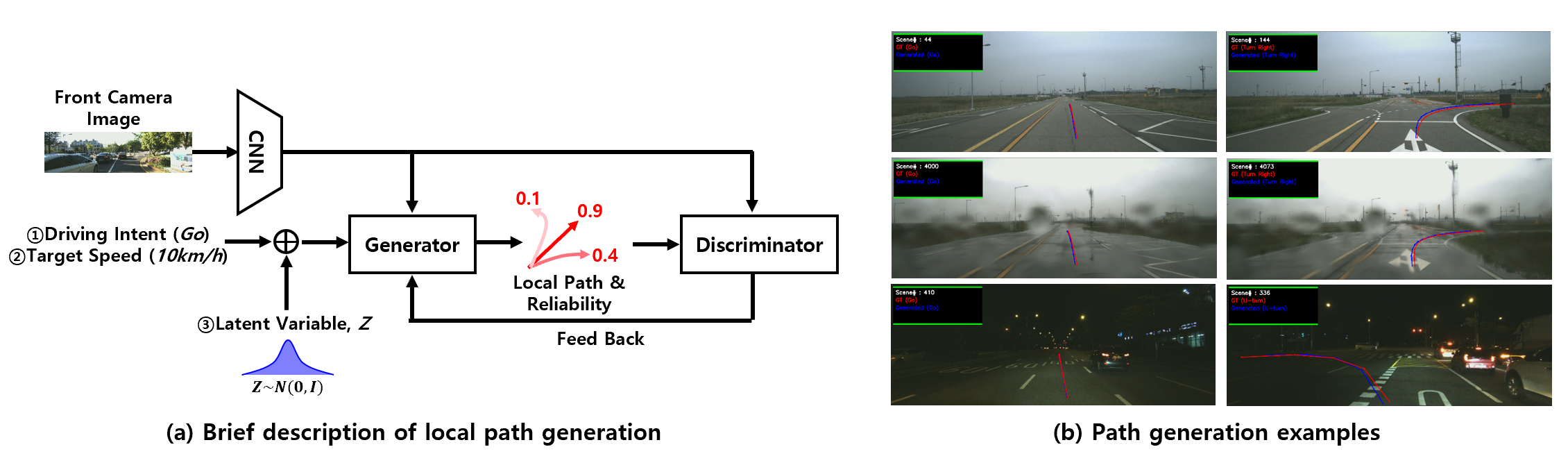
Local Path Generation for Motion Planning
Local planning models that improve safety and smoothness while preserving real-time feasibility.
Related publications
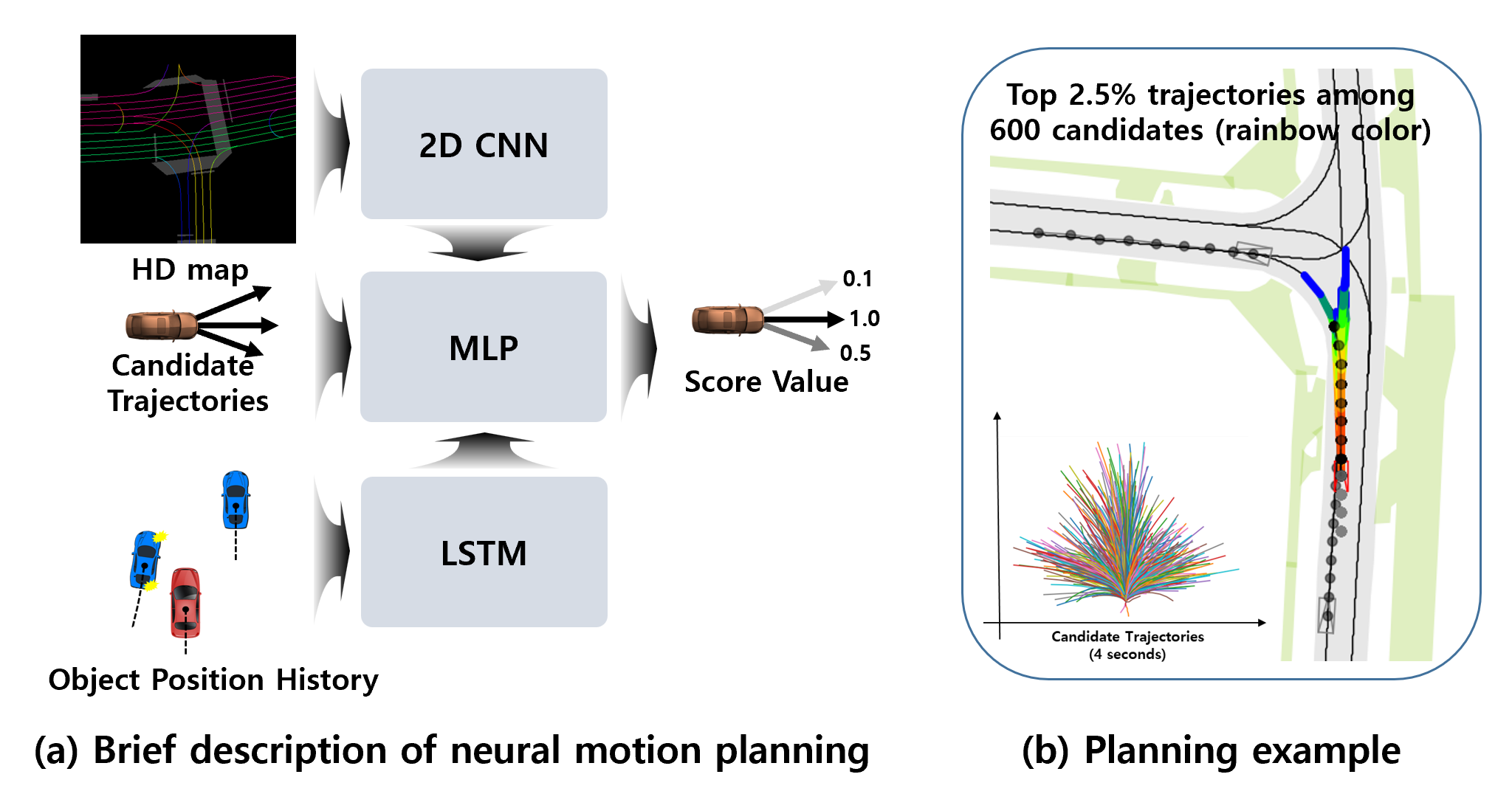
Neural Motion Planning
Neural planners for closed-loop driving decisions under dynamic traffic interactions.
Related publications: Not Yet.
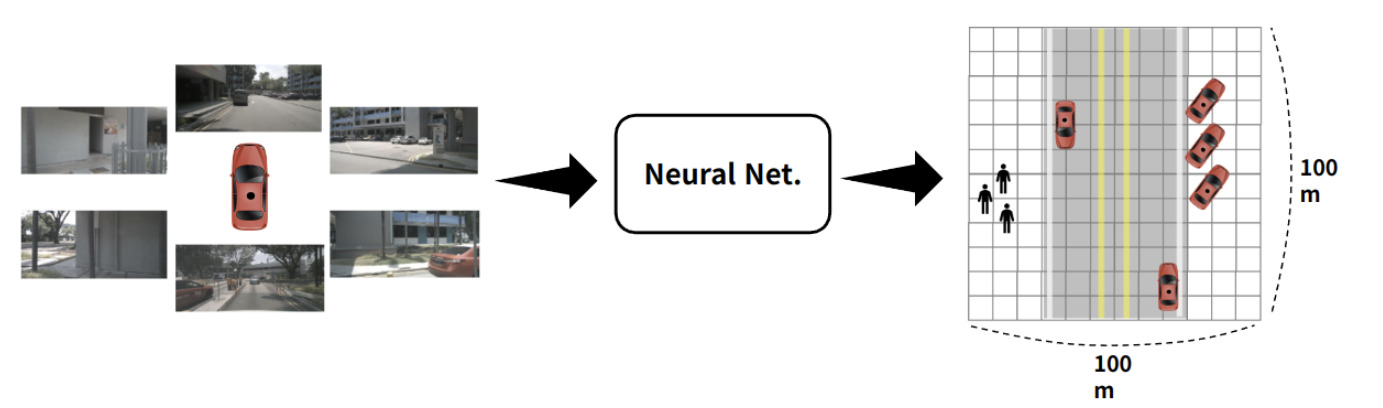
Top-View Semantic Segmentation
BEV segmentation from multi-camera imagery with geometry-aware regularization.
Related publications
Members
Principal Investigator
Email: d1024.choi@etri.re.kr
Students
Researchers
Email: hjb3880@etri.re.kr
Alumni
Email: hjb3880@etri.re.kr
Interns
Intern positions will be announced when openings become available.
Published Papers
* corresponding author
-
CycleBEV: Regularizing View Transformation Networks via View Cycle Consistency for Bird’s-Eye-View Semantic Segmentation
J. Hong, D. Choi*, T. An, K. An, K. Min.
CVPR 2026 [Accepted] [arXiv] -
Interaction Graph Pruning for Efficient and Robust Trajectory Prediction
M. Rahman, J. Hong, D. Choi*, K. Min.
Transactions of KSAE 2026 -
Regularizing Neural Networks for BEV Semantic Segmentation via Inter-class Hierarchy and Spatially-aware Weight Adjustment
J. Hong*, D. Choi, M. Rahman, K. An, K.-W. Min.
ICTC 2025 -
Beyond-Labels: Advancing Open-Vocabulary Segmentation With Vision-Language Models
M. Rahman*, D. Choi, S.-I. Lee, K.-W. Min.
ICACI 2025 -
LANet: A Lane Boundaries-Aware Approach For Robust Trajectory Prediction
M. Rahman*, D. Choi, K.-W. Min.
ICACI 2025 -
Insta-Track: Instance Segmentation Assisted Tracking by Detection
J. Kang, D. Lee, J.-H. Park, T.-H. An, D. Choi, K.-W. Min, S. Lee.
ICTC 2024 -
Progressive Query Refinement Framework for Bird's-Eye-View Semantic Segmentation from Surrounding Images
D. Choi*, J. Kang, T. An, K. An, K. Min.
IROS (Oral) 2024 [arXiv] [Code] -
CRFNet: Context ReFinement Network for Semantic Segmentation
T. An*, J. Kang, D. Choi, K. Min.
ETRI Journal 2023 -
Performance Comparison of SAC methods for Radar Dynamic Object Classification
Y. S. Park, D. Choi, K. Min.
IAS 2023 -
Vehicle Trajectory Forecasting Network based on Static Scene Context Modulation for Autonomous Driving
D. Choi*, K. Min.
Transactions of KSAE 2023 -
Hierarchical Latent Structure for Multi-Modal Vehicle Trajectory Forecasting
D. Choi*, K. Min.
ECCV 2022 [arXiv] [Code] -
PathGAN: Local Path Planning with Attentive Generative Adversarial Networks
D. Choi*, S.-J. Han, K. Min, J. Choi.
ETRI Journal 2022 [Paper] [Code] -
Regularising Neural Networks for Future Trajectory Prediction via Inverse Reinforcement Learning Framework
D. Choi*, K. Min, J. Choi.
IET Computer Vision 2020 [arXiv] [Code] -
SAE Level 3 Autonomous Driving Technology of the ETRI
K. Min*, S.-J. Han, D.-J. Lee, D. Choi, K.-B. Sung, J. Choi.
ICTC 2019 -
Future Trajectory Prediction via RNN and Maximum Margin Inverse Reinforcement Learning
D. Choi*, T.-H. An, K. Ahn, J. Choi.
ICMLA 2018 [Paper] [Code] -
Driving Experience Transfer Method for End-to-End Control of Self-Driving Cars
D. Choi*, T.-H. An, K. Ahn, J. Choi.
arXiv 2018 [arXiv] -
Blind Deblurring using Coupled Convolutional Sparse Coding Regularisation for Noisy-Blurry Images
T.-H. An*, D. Choi, S. Cho, K.-S. Hong, S. Lee.
Electronics Letters 2018